Bonjour à toutes et à tous.
.
Je vais aujourd’hui vous parler drone, alors je sais, il y a plein d’articles sur le net, mais c’est comme d’habitude, il faut visiter 30 sites pour en connaitre le minimum, c’est donc encore une mission pour votre humble serviteur, que de mettre à votre disposition en un seul article, le principal à savoir à ce propos.
Pour commencer, il existe une polémique sur le nom « drone » utilisé pour le loisir, en effet, ce mot fait peur à la populace, il est perçu comme un appareil voleur de vie privée, je n’entrerais pas dans ce débat, car si une majorité pense que le simple fait d’ajouter une caméra à un appareil de radio modélisme le transforme en drone, il va falloir expliquer des choses à certaines personnes incapables de les comprendre…
Ceusses qui ont si peur au sujet de la préservation de leurs vies privées, en règle générale si futiles, devraient apprendre que les caméras de surveillance, les téléphones cellulaires, les réseaux sociaux et j’en passe (salut Jean…), sont bien plus néfastes à ce niveau que les quelques drones de loisir qui en général n’utilisent que des caméras peu performantes, dépourvues de zoom optique, pour faire du pilotage en immersion. En cas d’enregistrement du vol, la plupart des images sont un peu tremblotantes et bien souvent parasitées.
Bon, passons…
Vous allez voir que ça regroupe quand même beaucoup de domaines, ça tombe bien, certains sont dans ma juridiction. Pour les autres, il va falloir que je planche un peu, et pour pour cela, rien de tel que d’en fabriquer un, de drone… Alors ce sera, comme pour mon imprimante 3D, plutôt de l’assemblage mais avec une grande latitude de choix en ce qui concerne les différents éléments qui composent notre appareil et surtout, des explications pour bien les choisir.
.
Voila comment tout a commencé :
– Un soir, alors que ma femme, mes enfants et moi-même dinions devant les infos, nous entendîmes que non contents de survoler les centrales nucléaires, les drones maintenant allaient taper dans les avions… A 2000 mètres d’altitude !!!
Je sortis alors la phrase fatidique: « Je sais ce que je vais faire »…
Un silence de mort se fit autour de la table, le battement des secondes de ma montre en devint audible et se mit à ralentir:
Tic!Tac!Tic!Tac!..Tic!..Tac!…Tic!….Tac!….Tic!…..Tac!……Tic!…….Tac!…………Tic!………… ????…………
Puis plus rien…
Le regard de ma compagne devint si noir, que l’obscurité commença à envahir la pièce.
Les pétales des fleurs, tombèrent, leurs tiges prirent une coloration brunâtre et se recroquevillèrent.
Et puis subitement, la chatte sautât sur ses pattes et partit s’écraser contre la porte-fenêtre, ma femme envoya les enfants au lit tout en verrouillant la porte du sous-sol avant d’en avaler la clef.
Mais la messe était dite…
.
Hum !… Bon… Construire un drone de A à Z, c’est dans le domaine du possible ?
Avec la technologie et les outils d’aujourd’hui, oui, et c’est même assez simple :
un drone, c’est avant tout un appareil doté d’une électronique assimilable à de l’intelligence embarquée, cela lui permet d’évoluer sans trop nécessiter d’attention de son pilote (quand pilote il y a) en ce qui concerne sa stabilité et même son guidage qui peut être totalement programmé.
Au minimum, un micro-contrôleur allié à un gyroscope et un accéléromètre récupérés dans une manette de jeux, du code et hop! C’est réglé.
Ça a l’air facile expliqué ainsi, mais pour une réalisation « DIY » il y a quelques obstacles de taille comme les capteurs externes au micro-contrôleur qui vont ajouter de l’encombrement et du poids, ce qui n’est pas vraiment compatible avec ce type d’engin. Il faudra donc compacter au maximum, concevoir une carte tout en un à base de CMS, ce qui n’est pas impossible mais si on ajoute le développement du code, il est clair que tout cela nécessite en plus de certains moyens techniques et financiers, un nombre conséquent d’heures de travail, donc de nuits blanches tout ça pour un projet unique avec en bonus… Des menaces de divorce 😦
J’ai donc décidé d’oublier la conception du contrôleur de vol, il en existe beaucoup et à tous les prix, d’oublier aussi la conception/fabrication du châssis, j’avais pensé mettre à contribution mon imprimante 3D mais l’ABS en mode rigide c’est lourd et nous parlons d’un truc qui vole… Elle servira quand même pour l’impression de pièces diverses.
En ce qui concerne le reste (moteurs, ESC, GPS…), le net offre un vaste choix, il suffit d’y puiser, ensuite, c’est de l’assemblage et des réglages.
Tout d’abord, commençons par un truc qui peut être important…
La loi :
- Il est interdit d’approcher ces engins à moins de 50m de zones peuplées (agglomérations…).
- Il est interdit de s’approcher à moins de 150 mètres d’un rassemblement de personnes.
- Il est interdit de survoler des animaux (?).
- Il est interdit de voler au dessus de 150 mètres d’altitude.
- Il est interdit d’utiliser un drone d’un poids supérieur à 25 kg.
- Il est interdit d’utiliser des solutions de vol autonome et en immersion à moins d’être deux, dont un pouvant suivre le drone en visuel et pouvant agir sur les commandes. Il est donc interdit de faire du vol en immersion en étant hors de vue de l’appareil (l’intérêt de cette pratique s’estompe alors quelque peu).
- Il est interdit de survoler les zones dites « no-fly zones » (maisons d’arrêts, centrales nucléaires, bases militaires…).
- Il est interdit d’évoluer à proximité d’aéroports et d’aérodromes.
- Il est interdit de voler la nuit.
Et j’ai du en oublier…
Le contrevenant s’expose à une peine de prison d’un an et de 75000€ d’amende…
Donc, si vous n’habitez pas le Larzac, il vaut mieux aller braquer une supérette que de piloter un drone. 🙂
Attention aux photos, et vidéos, elles doivent respecter la vie privée et ne doivent pas faire l’objet d’exploitation commerciale.
Et pour finir, le pilote est entièrement responsable des dommages que peut faire subir son engin ainsi que les objets qui pourraient s’en détacher, aux personnes et aux biens de la surface.
C’est clair: vous n’avez pas le droit d’utiliser un drone en extérieur si vous êtes citadin, il faudra sortir de la ville et aller loin de tout et de tous, en limitant votre domaine d’évolution à un carré dégagé d’environ 300 mètres de coté (si vous avez une bonne vue) sur 150 mètres en hauteur…
Si en plus vous voulez gouter aux joies du pilotage en immersion, il vous faudra inviter un ami compétent en la matière pour qu’il puisse sauter sur les commandes afin de sauver de la décapitation ce pauvre ramasseur de champignons qui passait par là, dans l’angle mort de la caméra… (Qui ce jour la, portait bien son nom 🙂 ).
Bien sur, il y a du bon sens dans ces textes, mais certains s’adressent quand même au nigaud de base, et d’après ce que j’ai entendu aux infos, il est évident qu’il ne l’a pas convaincu. C’est normal car celui qui l’a pondu doit encore être un spécialiste de la chose…
Quoi ? Ils sont plusieurs ? C’est pire encore !!!
En effet, écrire des textes de loi en se basant sur des évidences, ce n’est destiné qu’à des individus incapables de comprendre la base de ces évidences, et donc encore moins capables de se renseigner sur l’existence éventuelle d’une loi concernant leur passion. D’où le fameux texte : « nul n’est censé ignorer la loi ».
Ça rassure…
Ce qui m’horrifie, c’est que l’état, d’un coté pond des textes stupides afin de protéger le peuple de ces engins dangereux et de l’autre vote des subventions afin que l’armée se procure et fasse des recherches sur les drones de combat, qui ont déjà un bon palmarès de victimes innocentes à leur actif. Le futur drone de « Dassault aviation » est un véritable bijou technologique conçu uniquement pour tuer, c’est beau hein ?
Y’a comme un truc qui déconne… Pour tout vous dire, il y a même quelques abrutis qui planchent sur un projet de brevet de pilote de drones !!! Et d’autres qui voudraient une implantation de puce d’identification obligatoire !!! En vérité je vous le dis, nous ne sommes pas sortis de l’auberge de l’incohérence.
Et je ne vous ai pas parlé des fréquences interdites, des maxi en puissance d’émission etc… Tout ça pour ne pas déranger les lapins ! Puisque la ou elles pourraient gêner… Vous n’avez pas le droit de voler…
Si tout ça ne vous rebute pas, ou que vous vous en fichez comme de l’an quarante… Soyez responsable, soignez votre check-list et regardez bien aux alentours avant d’armer les moteurs.
Passons donc à la suite…
Pour le profane, la première chose à faire est d’établir un dico minimum afin de comprendre les termes importants, car comme dans toute discipline sortant un peu de l’ordinaire, nos amis radio-modélistes ont leur jargon.
.
Lexique:
BEC : Battery Eliminator Circuit. C’est un circuit électronique, un bête abaisseur de tension, c’est souvent lui qui alimente le CDV.
Il fait souvent partie de l’ESC afin de fournir la tension de 5V nécessaire à son entrée servo.
COF : Center Of Gravity. Ou CDG. Centre de gravité, sans commentaires…
DOF : Degres Of Freedom. Degrés de liberté, certains contrôleurs de vol sont donnés pour 6 DOF ou 10 DOF suivant le nombre de capteurs installés.
Un 6 DOF est équipé d’un gyroscope 3 axes et d’un accéléromètre 3 axes, un 10 DOF est équipé en plus d’un capteur de pression barométrique et d’un magnétomètre (une boussole), ces capteurs supplémentaires liés à un GPS permettent des modes de stabilisation supplémentaires ainsi que la navigation programmée et le RTH.
ESC : Electronic Speed Controlleur. C’est un variateur de vitesse alimenté en direct par la batterie il reçoit des signaux PWM envoyés par le contrôleur de vol sur sa prise de type servo et envoie la patate demandée au moteur via ses trois sorties (triphasé alternatif).
FAILSAFE : Configuration de l’émetteur ou du CDV en cas de perte de signal (comme quand si on éteignait la radiocommande en vol), il faut savoir que lors d’une perte de signal sans Failsafe, le CDV continue d’envoyer le dernier ordre aux moteurs ce qui fait que si vous êtes à ce moment en mode plein gaz, votre drone va continuer comme ça jusqu’au bout de sa batterie… Configurer un failsafe en mode gaz à zéro, lui permettra de tomber au lieu de continuer sa route et de percuter quelque chose ou quelqu’un voire de tout simplement se perdre. Il est possible de le configurer pour qu’il tombe plus doucement avec 10% de gaz par exemple (attention ! Les hélices tournent encore…), ou bien avec un RTH.
FC : Flight Controler ou bien CDV. Contrôleur De Vol. C’est la pièce maitresse, le cerveau du drone, il fait l’interface entre le récepteur radio et les différents organes qui composent la partie active de l’engin (ESC, télémétrie…) traitant les ordres reçus selon la configuration de vol demandée (stabilisation surtout). Inutile de vous dire que sans son aide, en branchant direct les moteurs à la sortie du récepteur, le contrôle de l’engin serait hyper-réactif et quasi impossible pour un pilote lambda.
FPV : First Person View. Pilotage en immersion à l’aide d’une caméra, d’un émetteur et d’un récepteur vidéo relié à un écran ou à des lunettes LCD.
KV : Kilo Volt. Alors là, l’électricien en entendant ça, se dit que cette passion est très dangereuse…
Tu m’étonnes… 4 moteurs de 2000 kV chacun !!! Il n’aurait pas tort, encore que l’étonnant dans l’histoire serait le type de batterie utilisée.
Je hais l’utilisation des abréviations d’unités existantes remaniées n’importe comment, ça induit en erreur le non initié, rappelez vous le kilo octet à 1024 octets (et la, c’était beaucoup moins grave…).
Pour moi, et pour beaucoup d’autres, 1 kV=1000 Volts, et puis c’est tout !
Et bien non !!! 1KV=tours minute/Volt. Super logique…
Donc le KV (notez le k majuscule) est le nombre de tours par minute que va faire le moteur en consommant un Volt.
Bon, OK.
OSD : On Screen Display. Incrustation vidéo en temps réel d’indications utiles comme l’assiette, la vitesse, la direction et la distance qui vous sépare du drone, la charge des accus, la sélection du mode de vol…
PWM : Pulse Width Modulation. Chez nous on appelle ça MLI (Modulation en Largeur d’Impulsion), c’est très utile dans bien des domaines, je m’en sert par exemple pour varier l’intensité des LEDs dans certaines de mes réalisations. Cette modulation est aussi intégrée dans certains chips, par exemple (au hasard) le MAX7219 qui s’en sert pour gérer l’intensité des afficheurs. L’intérêt de cette méthode c’est qu’il n’est point besoin de toucher à la tension d’entrée ce qui permet de faire varier la vitesse d’un moteur en conservant un maximum de couple.
PPM : Pulse Position Modulation. Encore une modulation de signal… Sur ma radiocommande FLYSKY, ça s’appelle du CPPM et c’est la même chose. L’intérêt principal est de n’utiliser qu’un seul fil pour transmettre toutes les voies entre le récepteur et le CDV, on gagne un peu en poids et c’est du fouillis en moins.
RSSI : Receiver Signal Strength Indication. C’est l’indication de la puissance du signal de la radiocommande. On trouve généralement une prise dédiée sur le récepteur, permettant au CDV de la connaitre et de la relayer à la station au sol. Certains récepteurs sont capables de le faire sans passer par le CDV. Attention ce n’est apparemment pas une norme puisque qu’il y a des différences entre certains constructeurs.
RTB/RTH : Return To Home/Base. Cette option permet un retour automatique du drone à son point de décollage. Il faut qu’il soit équipé d’un GPS et d’un compas qu’on appelle aussi magnétomètre.
UAV : Unmanned Aerial Vehicle. Véhicule aérien sans pilote, l’autre mot pour « drone ».
Et voila pour les termes les plus souvent rencontrés dans ce domaine, cela vous permettra de parler en connaisseur et de faire des phrases genre:
– « Hier, grâce à mon QAV250 équipé d’un CDV 10 DOF j’ai pu faire un plan FPV sympa et tester mes nouveaux moteurs 2000 KV et mes ESC que j’avais placés près du CDG. La portée était sympa, j’avais à 800 mètres un top RSSI qui affichait un 7/10 sur mon OSD. Puis mon UAV a fini par perdre le signal, heureusement que j’avais configuré le FAILSAFE en RTH, je me serais sinon retrouvé le BEC dans l’eau… »
Succès garanti 🙂
.
Alors, de quoi se compose un appareil radio-piloté ?
- D’un châssis.
- D’un ou plusieurs moteurs.
- D’une ou plusieurs hélices.
- D’un ou plusieurs ESC.
- D’un récepteur radio.
- D’une radio commande.
- D’un CDV.
- D’une batterie.
Si on y ajoute :
- Une mini caméra pour piloter en immersion.
- Une autre mini caméra HD pour faire de la prise de vue.
- Un émetteur vidéo pour transmettre la vidéo nécessaire au FPV.
- Un circuit OSD encore pour le FPV.
- Un écran LCD ou des lunettes LCD toujours pour le FPV.
- Une télémétrie (quand elle ne fait pas partie du CDV), toujours utile pour le FPV, c’est la que l’OSD va piocher certaines des infos.
- Un GPS.
- Des capteurs divers, sachant que le contrôleur de vol en intègre déjà un minimum.
La, nous obtenons vraiment un drone.
Quelques options pratiques :
- Une plaque de distribution, pratique pour relier les ESC à la batterie.
- Un buzzer qui, couplé à un interrupteur sur la radio commande, est une aide précieuse en cas de perte de l’engin dans les hautes herbes.
- Des LEDs pour différencier l’avant de l’arrière, histoire par exemple d’éviter au débutant de se prendre le drone pleine face en voulant l’éloigner.
.
Quoi comme drone ?
Après réflexion, je décide de faire un multi-rotors, enfin multi… Disons quatre, donc un quadricopter aussi appelé quadcopter, et souvent abrégé en « quad » ce qui peut porter à confusion. Le seul gros problème de ce choix est qu’en cas de panne d’un moteur ou d’un ESC, c’est le crash assuré.
Le type :
il existe toutes sortes de types de quadricopters, de course, de voltige, de prise d’images (enfin pour de la prise d’images pro. préférez un six rotors et plus, pour une simple question de stabilité).
Je penche pour un engin plutôt polyvalent, capable de faire un peu de tout.
Donc branches de supports moteurs en X, enfin presque, et châssis « long ».
La taille :
pas trop petit, pas trop grand, donc 250mm (mesure prise sur la diagonale entre deux moteurs).
Ça se déplace comment ?
- Les moteurs tournent tous à la même vitesse, l’appareil est stationnaire.
- Les deux moteurs opposés aux autres ralentissent, l’appareil s’incline et glisse dans cette direction.
- Les moteurs opposés en croix ralentissent, l’appareil tourne sur lui même.
Le reste n’est qu’une question de dosage entre les moteurs et permet à l’appareil d’évoluer dans tous les sens.
.
LE CHOIX DES COMPOSANTS :
La, je vais entrer un peu dans les détails, ça couvre pas mal de domaines comme je vous l’ai expliqué plus haut, et il est important d’en maitriser un minimum pour éviter les mauvaises surprises.
– Le châssis :
il doit être léger et solide; pour cela il y a la fibre de verre, mais si vous voulez le meilleur rapport légèreté/solidité, rien ne vaut la fibre de carbone, le problème avec la fibre, c’est qu’il faut un minimum de matériel pour travailler ces tissus (résine, gel-coat, pompe à vide…). C’est couteux, sans compter la matière première dans le cas du tissu de carbone.
À l’évidence, il faut l’acheter déjà fait. Alors un p’tit tour dans la jungle du net et comme d’habitude la solution la moins onéreuse vient de Chine…
Je me suis décidé pour un châssis en carbone de type QAV-250 avec des bras rapportés (pratique en cas de casse).
Il y a un emplacement sur le dessus pour une petite plate-forme (fournie) sur silent-bloc permettant d’y positionner une mini-cam HD.
– Les moteurs :
ils fonctionnent en alternatif, et en triphasé. Pour les différencier on utilise cette fameuse unité: le KV.
L’important, c’est le couple, pour un petit drone, donc doté de petites hélices, pas besoin de couple important mais il faut compenser avec plus de vitesse. Donc dans mon cas: gros KV… Mais pas trop car l’augmentation des KV va diminuer l’autonomie.
Pour ce projet, le moteur EMAX « 1806 » de 2280 KV est tout indiqué, il pèse 18g, en soulève 560, c’est d’un bon rapport. À l’intérieur, on trouve 12 minis bobines sur le stator, donc la partie fixe, 14 minis aimants sur le rotor, 2 minis roulements, 1 axe fileté dans sa partie supérieure avec une rainure sur la partie inférieure pour recevoir le circlip qui assemble le tout et basta.
Comme les moteurs ne tournent pas dans le même sens, les filetages des axes qui reçoivent les hélices sont soit à droite (pour les moteur à rotation anti-horaire), soit à gauche (pour la rotation horaire), dans le but d’éviter que les boulons ne se desserrent (surtout au démarrage à cause du couple). Vous verrez un peu plus loin que c’est important même si on peut éviter cela en serrant comme un âne (pas trop quand même…). Pour en terminer avec les moteurs, pour inverser leur sens de rotation, il suffit d’inverser deux phases, ce qui est logique.
– Les hélices :
c’est la partie consommable du drone, c’est pas cher et ça tombe bien car comme vous devez vous en douter c’est aussi la plus fragile, soyez en certains, le débutant en pilotage en détruit quelques-unes !
Il est nécessaire d’en avoir deux types: pour rotation horaire et anti-horaire selon le moteur où elle seront fixées.
J’ai essayé d’en imprimer… Échec ! Ce n’est pas facile car sur un drone de 250mm elles sont petites, leurs bords sont fins et, en impression 3D (FDM), ils sont trop fragiles et se délitent.
Il n’y a pas trente six solutions pour arriver à un résultat suffisamment solide, on peut utiliser la technique du moulage par injection, possible si on possède une usine de pare-chocs par exemple, mais ce n’est pas mon cas…
Un autre moyen est de les usiner à partir d’un bloc de bois ou d’alu, c’est plus à ma portée mais il y a quelques inconvénients:
la conception d’abord, qui demande quand-même quelques compétences en aérodynamisme et en mathématiques.
Ensuite, le matos d’usinage car quand on regarde de près le profilage d’une hélice efficace, on se rend bien compte que sans l’aide d’une CNC, c’est presque mission impossible.
Mais le pire, c’est leur dangerosité car au vu (et vous verrez plus loin que je sais de quoi je parle) des dégâts qu’une hélice en plastique peut faire, je peux vous assurer que d’en monter en alu ou en bois sur un drone de loisir le transforme en arme et que c’est une idée stupide.
Il existe aussi des hélices en carbone qui dans le genre guillotine, doivent être assez efficaces aussi.
Et puis ces autres solutions ont leurs prix… À comparer à celui d’un pack d’une dizaine d’hélices en plastique qui ne coute que quelques Euros.
J’ai donc acheté deux packs de 16, en plastique.
– Les ESC :
nous avons déjà vu ce que c’est dans le lexique, mais approfondissons…
Si nous enlevons la gaine thermo qui protège un ESC, nous trouvons :
- De l’électronique de conversion continu/alternatif.
- De l’électronique de conversion de tension (pas toujours, mais souvent), c’est la partie BEC qui permet d’alimenter le CDV via les prises type servo, c’est un exemple car on peut récupérer cette tension pour alimenter autre chose.
- Un micro-contrôleur, c’est lui qui reçoit les ordres via la prise servo et qui envoie les impulsions nécessaires au moteur.
- Un ou plusieurs condensateurs histoire de lisser la tension, parce que ça ripple sévère la dedans.
Comme il y a un micro-contrôleur, on peut le reprogrammer, ça va du contrôle du frein moteur à la musique du buzzer, pour cela il faut acheter, pour généralement une bouchée de pain, une carte de programmation spécifique selon le constructeur.
Enfin, pour les choisir (il en faut un par moteur), il faut qu’ils soient adaptés aux moteurs qu’ils vont asservir, et pour cela, Il y a des calculs à faire, c’est un peu galère car les formules que j’ai trouvé demandent des données en pouces pour les diamètres et les pas d’hélices (oui ça va jusque la…).
C’est déjà rébarbatif en système métrique, ne voulant pas me prendre la tête avec des conversions sur ces unités d’un autre temps, je me suis donc référé à des modèles existants et j’ai choisi des ESC de 12A comprenant des BEC de 5V/1A qui conviennent très bien en association avec des 1806. Poids: 10g pièce.
Ils sont équipés de firmware « Simonk » c’est adapté aux multi rotors, ils sont rapides et leur programmation n’intègre pas de sécurités comme la coupure automatique liée à une surchauffe ou à un niveau de batterie trop bas, ces sécurités sont inutiles sur un drone de ce type car elles auraient systématiquement un crash comme conséquences.
C’est la que l’OSD est utile.
– La radio commande :
son boulot est d’encoder et d’envoyer sous forme de signal radio (le plus souvent sur 2.4GHz), les informations électriques qui correspondent aux positions des potentiomètres et interrupteurs.
Dans le cas d’un quadricopter, il y a quatre moteurs, donc un émetteur 4 canaux est suffisant, mais un ou deux canaux supplémentaires peuvent être utiles, ne serait ce que pour changer le mode de vol ou déclencher une action quelconque (buzzer, LEDs…).
J’ai trouvé une radio commande intéressante par son prix et ses possibilités: la FLYSKY « FS-I6 » sœur jumelle de la TURNIGY « FS-I6 » et pour cause: elles sont fabriquées dans la même usine. La FLYSKY est la moins chère… Adoptée !
Elle est fournie avec un récepteur 6 canaux au choix IA6 (PWM) ou bien IA6B (PWM+PPM).
– Le CDV :
j’ai, en premier lieu, pensé à la solution ARDUPILOT parce qu’elle est à base d’ARDUINO, je connais bien…
Le processeur est L’ATMEL MEGA 2560, donc un 8bits. A mon avis, il est capable de faire beaucoup de choses mais il trop lent pour ce type d’applications, surtout si on commence à grossir le code pour y gérer d’autres fonctionnalités et d’autres capteurs.
Dans le même genre, il y a la carte MULTIWII, sympathique aussi, mais au niveau processeur, c’est pire avec un AT328P…
Alors bien entendu, je fais un peu le difficile, mais je connais bien ces micro-contrôleurs que j’utilise souvent, d’ailleurs, si vous avez lu mon article sur la fabrication d’une imprimante 3D vous avez du remarquer que la carte RAMP est un shield piloté par un ATMEGA 2560.
Pour un contrôleur de vol c’est un peu léger et il faudrait déporter la télémétrie pour le soulager, sur un 250 c’est galère (place disponible, poids, fils en plus…), ou bien lui adjoindre un coprocesseur ce qui ne simplifie pas le codage (c’est d’ailleurs le cas pour l’ARDUPILOT).
Deux autres cartes (en open-source aussi) ont attiré mon attention: la NAZE32 qui embarque un STM32 (donc un 32 bits) et la CC3D dotée du même cerveau.
Il en existe plusieurs versions de ces cartes, les différences portent surtout sur le nombre de capteurs embarqués et sur la mémoire.
La CC3D (CC comme Copter Control) est configurable par un logiciel vraiment bien conçu: LIBREPILOT (anciennement OPENPILOT), ce logiciel est vraiment ce que l’on peut trouver de mieux pour commencer dans le monde des drones, ailes, hélicoptères… Il est en développement constant et gère toutes les CC3D, son assistant de configuration est un modèle du genre et permet de configurer tous types de véhicules, mêmes terrestres, dans différentes configurations moteurs, c’est un choix idéal. Bon, le logiciel CLEANFLIGHT n’est pas mal non plus, il gère aussi bien les CC3D que les NAZE (ce n’est pas vraiment un nom très judicieux pour les Francophones… Ma NAZE est nase, c’est nase… 🙂 ).
J’ai fixé mon choix sur la CC3D après un tour sur le net car il y a une grosse communauté d’utilisateurs très active, le forum associé est riche de renseignements sur toutes sortes de véhicules, périphériques, et bien entendu les différentes versions des cartes.
Comme je l’ai déjà signalé, la licence des cartes est « open » on en trouve donc de toutes les couleurs, tailles et dénominations « ATOM » « REVO » « MINI » mais en gros toutes se rapportent à deux modèles principaux :
- La carte de base. Limitée en mémoire (128Ko de flash et 20 Ko de RAM) c’est une carte 6 DOF qui est top pour le pilotage pur, elle gère six canaux mais pas question de s’amuser avec un GPS pour autre chose que d’afficher le positionnement sur un OSD, donc oubliez le RTH par exemple car elle ne possède pas de magnétomètre et malgré ses ports E/S la place mémoire est limitée, je sais, c’est nul de concevoir un truc avec des possibilités d’extensions limités par une bête question de mémoire…
Mais comme je le disais plus haut, si vous voulez seulement piloter sans assistance autre que gyroscopique, c’est une super carte, avec des versions mini et micro qui sont vraiment petites et légères. - La « REVOLUTION » dotée de la version F4 du STM32 (virgule flottante), plus rapide et d’une mémoire plus importante (1 Mo flash/192Mo RAM). Cela lui permet de faire tourner un code plus conséquent et plus rapidement. C’est une 10 DOF, elle intègre donc deux capteurs supplémentaires: un magnétomètre, qui couplé à un GPS permet le RTH et la navigation autonome (ce qui est interdit par la loi), et un capteur barométrique très sensible permettant de connaitre l’altitude relative avec une grande précision. On y trouve aussi un port sonar (pour un SR-04) et un modem RF permettant une liaison télémétrique constante au sol, donc en temps réel avec son recepteur OPENLINK, optionnel et ceci avec le logiciel LIBREPILOT qui est vraiment un tout en un. Cette version de carte est aussi disponible en taille mini.
J’ai décidé de prendre la carte de base dans sa taille la plus « grande » (40mm X 40mm X1 5mm).
– La batterie :
Le problème des batteries, c’est que c’est lourd, encombrant et cher, une batterie de forte capacité coute aussi cher qu’un contrôleur de vol d’entrée de gamme. Un truc important à savoir sur les batteries utilisées dans le domaine des drones c’est que pour des raisons de performances et de poids, elles sont en majorité composées d’éléments de type Lithium-Polymère, alors un élément Li-Po c’est un accu de 3,7 Volts, chargé à fond il délivre 4,2V, une batterie de 12 Volts c’est 3 éléments branchés en série. Prenons un exemple: une Li-Po 2200 mAh 3S 30C, cette batterie est une 3 « S » donc 3 cellules branchées en Série 3X3,7 Volts=11,1 Volts, c’est une 2200 mAh ce qui veux dire qu’elle est capable de fournir 2,2 Ampères pendant une heure, mais on peut lui demander de restituer plus que ça en instantané (d’ailleurs c’est très souvent le cas), sa limite nous est donnée par le nombre qui précède le « C », donc dans notre cas, pas plus de 30 fois sa capacité ce qui nous fait 30 x 2,2A=66 Ah. Bien entendu si on lui demande ça en permanence, la résultante sera que ça va méchamment grever le temps de vol puisque un simple calcul (60mn / 30) vous démontrera qu’à ce régime, cette batterie va se vider en deux minutes. Et puis elle ne va pas aimer ça, elle va accepter ce traitement en mode « burst » c’est à dire de temps en temps et pas longtemps, si on insiste, on va taper dans ses points de vie.
Je n’ai pas pris cet exemple au hasard, c’est celle que je vais utiliser qui d’après mes calculs approximatifs devrait m’offrir 10 à 15mn d’autonomie de vol ce qui sera suffisant pour m’initier. Il faudra quand même que je m’en procure une autre car sa recharge dure près d’une heure… Il faudrait moitié moins de temps en lui envoyant du 4,4 Ah et même deux minutes (pas vraiment, la charge se faisant en envoyant la patate au début et en diminuant progressivement) en envoyant 66 Ah (c’est une 30C donc théoriquement possible) mais comme je suis respectueux envers les accus qui sont des éléments fourbes et dangereux, j’effectue toujours les charges en 1C et je vous conseille de faire de même si vous voulez éviter de gros problèmes. Il faut vraiment faire attention avec de type d’accus, ils n’apprécient pas du tout de ce prendre trop de charge (maximum 4,2V ), ou de passer sous le seuil des 3V. Reliés en série, c’est pire encore car les éléments doivent êtres chargés à la même tension, si un élément dépasse son maxi il va gonfler, et/ou exploser, et/ou dégager des vapeurs toxiques, et/ou prendre feu. Inversement, si vous tirez trop dessus et qu’un élément passe sous sa valeur mini, il subira alors une détérioration dont le niveau sera proportionnel à la baisse de tension. Pire encore: si un des éléments baisse significativement, le chargeur considérera la batterie avec un accu en moins ce qui posera vite un gros problème… Il faudra ruser pour qu’il soit de nouveau reconnu (s’il n’est pas mort, et quand bien même, il n’aura plus les mêmes performances).
– La mini-caméra FPV :
légères, avec une bonne qualité vidéo, je conseille les caméras CCD 600-700-800 TVL. TVL c’est pour « Télévision Lines » C’est le nombre d’alternances de lignes verticales noires et blanches qui donnent une résolution horizontale. Donc, plus le TVL est important, meilleure est la résolution.
C’est bien, mais ça ne suffit pas à assurer une belle image, il existe d’autres facteurs importants comme la qualité de l’objectif, le type de capteur, la présence ou non d’un DSP spécifique.
Le transmetteur vidéo aussi va avoir un impact sur la qualité finale et en plus, va faire apparaitre une autre donnée importante qui est le temps de latence.
Laissez moi simplifier le principe de fonctionnement de ce type de caméras:
l’objectif concentre l’image sur une sorte de grille qu’est le capteur, chaque case de la grille est convertie en tension, donc nous avons un signal analogique. Ensuite, ce signal va être converti en numérique. Plus il y a de cases, plus c’est précis, plus ça consomme etc…
Il existe deux types de capteurs: CCD et CMOS.
Les capteurs CCD réagissent plus vite que les CMOS aux alternances importantes de différences de luminosité ce qui fait d’eux les candidats idéaux pour les caméras orientés FPV.
Les capteurs CMOS consomment beaucoup moins que les CCD et sont plus rapides en traitement.
Les fabricants de caméras, ajoutent sur certains de leurs modèles des puces spécialisées (DSP) qui vont reprendre le signal numérisé en sortie de capteur afin de corriger certaines choses souvent en rapport avec la couleur, la balance des blancs, voire ajouter des fonctionnalités (détection de mouvement par exemple).
Une caméra CCD 600TVL premier prix, est largement suffisante pour faire du pilotage en immersion, la première chose à vérifier est la focale de la lentille, plus elle est importante, plus le champ de vision sera fermé, inversement plus le champ s’ouvrira mais à un certain point il y aura un effet « tonneau » assez désagréable. Inutile de vous dire qu’avant 2,1mm c’est bien déformé sur les bords et qu’après 2,8mm le champ se resserre, donc 2,8mm c’est le meilleur compromis.
Je me suis renseigné afin de faire un tableau avec deux colonnes: focale et angle. Le problème c’est que personne n’est d’accord, les fabricants, les vendeurs, et même les utilisateurs disent n’importe quoi, on arrive à des différences qui vont jusqu’à 50° sur un même objectif, ce qui n’est pas rien !
Et puis, il manque quelque chose, la distance de mise au point qui varie suivant la focale. Et oui ! L’optique est une science…
Une autre donnée intéressante est sa sensibilité à la lumière, ce qui va vous indiquer à partir de quel seuil de luminosité elle est capable d’afficher une image exploitable. C’est quelque chose qui peut être utile si par exemple vous volez dans les bois, les parkings souterrains ou d’autres endroits où il peut y avoir des zones vraiment faibles niveau éclairage.
Voila, je vais arrêter la sinon le paragraphe va s’allonger méchamment, il y a énormément de choses à dire sur les caméras FPV, qui bien souvent sont à la base de simples caméras de surveillance à peine modifiée (quand elles le sont). De mon coté, j’ai déjà une CCD 700 TVL 2,8mm avec puce SONY EFFIO, c’est celle que je vais utiliser, l’image est très bonne. On peut y modifier certains paramètres via son OSD intégré, c’est cool. La bonne nouvelle est qu’associée avec l’ensemble émetteur récepteur vidéo de mon choix, le temps de latence est nul, et ça, en FPV, c’est capital.
– La caméra HD :
Elle permet de filmer avec une résolution et une qualité d’image bien supérieure à celle d’une cam FPV, elle embarque sa carte mémoire et sa batterie. Elle ne transmet donc pas ses vidéos qui ne passent pas par la moulinette du transmetteur, alors pas de latence à craindre ni de brouillage, donc que des avantages ?
Pas tout à fait, elle ajoute du poids (méfiez vous des caractéristiques, la batterie pèse souvent plus lourd que la caméra elle même), de l’encombrement aussi, elle est particulièrement exposée en cas de crash, et elle coute une blinde… Certaines ont une sortie vidéo permettant de les utiliser aussi et en même temps comme caméras FPV, c’est encore plus cher.
Je n’en ai pas… Pourquoi ? Parce que je fais la chasse au poids, alors je sais qu’elle ne sont pas bien lourdes, mais j’en suis à couper les vis trop longues, à faire attention à la densité de remplissage des pièces imprimée, le nombre et la longueur des fils…
C’est pour cela que j’ai choisi une 700TVL EFFIO en caméra FPV, s’il me prend l’envie de faire de la prise de vue, il me suffit de couper l’OSD à distance via l’interrupteur de mode de vol. La qualité est moins bonne qu’avec une cam HD, mais on arrive à s’en approcher avec de bons réglages et une bonne qualité de transmission, j’ajoute que je ne suis pas hyper exigeant à ce niveau.
– L’émetteur audio/vidéo :
En général ça se passe sur la bande des 5.8 GHZ. Il en existe de toutes marques, tailles, puissances, le moins que l’on puisse dire c’est que quelque soit le modèle, ça chauffe (vraiment) beaucoup.
Au début, j’avais un type BOSCAM « TS351 » de 200mW avec possibilité d’émettre sur huit canaux (un à la fois au choix), il a un micro intégré et il annonce une portée de 2km en extérieur. Tu parles… Il n’est pas même pas capable de garder une liaison nette à 20 mètres en intérieur !
Pas terrible et on est déjà hors la loi en puissance d’émission (en France le maxi c’est 25mW, sans commentaires…).
Quitte à être hors la loi, autant prendre un 600Mw, d’autant que j’en ai trouvé un deux fois plus léger et petit. Il peut envoyer sur 32 canaux, audio et vidéo mais n’a pas de micro intégré (damned ! Je ne pourrais pas entendre le bruit des moteurs). C’est aussi un faux BOSCAM « TS5828« , il a couté 13€ et il fonctionne à merveille.
Il est préférable de virer l’antenne directionnelle fournie avec et en mettre une de type « champignon » pour assurer une bonne transmission pendant les évolutions.
Il existe d’autres type d’antennes, et chacune à ses qualités et ses défauts.
– Le récepteur audio/vidéo :
C’est aussi un type BOSCAM, le « RC305« , il reçoit sur huit canaux, et chose utile, possède deux sorties A/V, cela permet de brancher un DVR type ARCHOS sur une sortie et des lunettes ou masque d’immersion sur l’autre. Petite précision, le choix du canal se fait par micro-interrupteurs et c’est une galère… Si vous devez souvent changer de fréquence, ne faites pas comme moi, préférez un modèle avec choix par un bouton avec afficheur 7 segments, ça vous évitera de vous creuser la tête sur la logique Chinoise au niveau de la représentation visuelle (schéma) des micro-interrupteurs qui n’est pas la même d’un constructeur à l’autre… (ce conseil est valable aussi pour l’émetteur).
Je conseille aussi d’en changer l’antenne.
– L’écran :
Vous allez me dire qu’un écran c’est un écran et qu’à part la taille et la résolution de l’image, ça ne va pas aller plus loin au niveau des critères de sélection, et bien il reste un petit truc qui peut avoir son importance: le » blue screen ». Ouaip, l’écran bleu, et alors ? Tout le monde connait : en l’absence de signal vidéo, une majorité d’écrans affiche un écran bleu, plutôt que des parasites (c’est flippant les parasites, surtout si une voix de petite fille se fait entendre par dessus…). Le problème, qui n’en est pas vraiment un en utilisation classique, c’est qu’il y a un temps de commutation lorsque le signal vidéo refait surface, genre une ou deux secondes donc de quoi faire du chemin en FPV et se prendre un platane, un chien, son maitre… En effet le problème du FPV c’est que le signal vidéo peut être brièvement interrompu n’importe quand si un obstacle se met dans la trajectoire de l’onde radio, et il vaut mieux avoir une image parasitée au contours visibles que deux secondes de bleu. Il existe donc des écrans LCD dépourvus de cette commutation en bleu, et il est préférable d’utiliser l’un de ceux la. Un pare soleil est aussi un accessoire utile (facile à faire soi même).
– Les lunettes LCD :
C’est surement plus confortable que le truc que je me suis fabriqué avec un écran LCD et une lentille Fresnel, mais bon, l’écran c’est 20€, la lentille c’est 3€ je vous laisse faire le calcul… Que vous comparerez aux prix des lunettes FPV qui démarrent aux alentours des 300€ et montent à plus de 600€ ! J’aimerais bien tester ça, mais je vais attendre que ça baisse un peu.
– L’OSD :
Il en existe quelques uns, mais je ne me suis pas vraiment posé de questions sur les performances et la qualité d’incrustation, dans mon cas, la taille et le poids sont des critères primordiaux, j’ai donc choisi le plus petit et léger possible: le « Micro MinimOSD » à base d’AT328P (décidément il est partout) couplé à un MAX7456 (un chip conçu pour l’incrustation vidéo).
De taille vraiment mini et très léger, il se connecte à la télémétrie du contrôleur de vol en protocole série sur lequel il va puiser diverses informations, et de l’autre sur le signal vidéo où il incruste les données.
Il dispose de quelques entrées analogiques sur lesquelles on peut brancher en direct le signal RSSI du récepteur radio s’il est compatible (pas dans mon cas), les fils de deux batteries histoire que le 328P y sonde le voltage. Il y a même un contact dédié à une sonde de courant.
Il s’alimente en 5v, et consomme maxi 500mAh.
Il se configure par un logiciel permettant de régler l’affichage (positionnement et type des informations) l’interfaçage se fait avec un convertisseur série/USB.
Sympa ce petit module, et il est même capable de fonctionner en autonome, c’est cool.
– Le GPS :
Pas grand chose à en dire, sauf qu’il permet d’afficher sur l’OSD des informations de positionnement, de vitesse, d’altitude… Et qu’utilisé conjointement avec un magnétomètre il permet le RTH et la navigation autonome, mais ça, je l’ai déjà dit.
C’est lui, qui en fin de compte transforme ce qui n’est qu’un appareil volant radio-commandé en drone. Le facteur taille est important, plus le récepteur est grand et plus il est rapide au niveau acquisition des satellites, le problème est le facteur poids qui est proportionnel, inutile de dire que pour un petit drone cela va influer sur des facteurs importants (autonomie, performances…). J’ajoute un petit détail qui a une certaine importance (surtout pour les possesseurs de petits Drones): le magnétomètre intégré au CDV est souvent perturbé par les ESC et les moteurs qui génèrent à outrance des perturbations électro-magnétiques pouvant être très gênantes… La solution est alors d’adopter un GPS pourvu d’un magnétomètre, de le placer sur un petit mat histoire de l’écarter des rayonnements, et de désactiver celui du CDV.
– La plaque de distribution :
Bah… De base, il s’agit d’un petit PCB sans composants avec des pads qui relient les fils d’alimentations des ESC à la batterie. C’est utile pour ne pas avoir à avoir des fils à souder entre eux et donc plus pratique pour changer un ESC en panne. Il existe des modèles qui comportent des éléments utiles comme des BEC supplémentaires ainsi que d’autres pads pour relier des périphériques, certaines intègrent des éléments genre buzzer, interrupteur pour LEDs etc… J’ai choisi une carte MATEK avec BECS 5V et 12V ( le BEC 12v est inutile dans mon cas étant donné que ma batterie est une 3S, donc une 12V).
Voila pour les différents éléments.
Une fois tout ça rassemblé, il faut assembler de manière intelligente et ce n’est pas évident vu la taille réduite du bidule.
.
L’assemblage :
déjà, le châssis, je passe sur le montage enfantin à base d’entretoises, gamin j’ai connu des montages MECANO bien plus complexes.
Le châssis est composé de trois plaques, il y en a deux qui enserrent les bras puis une autre qui fait office de plate-forme supérieure.
Du coup, on a deux plates-formes permettant de placer tous les organes et ce n’est pas de trop.
Ça se présente comme ça :
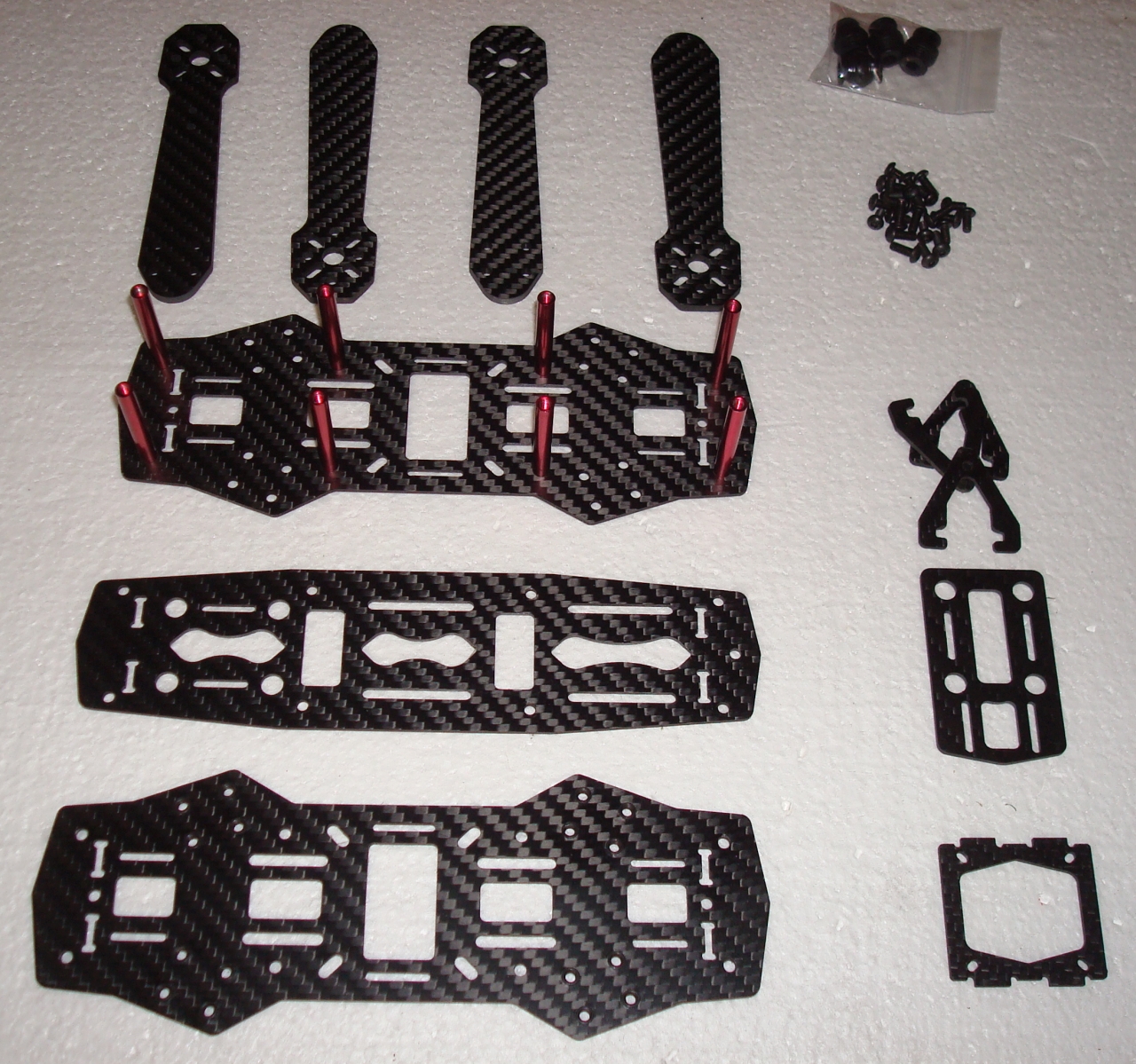
Vous l’avez compris, la pièce du milieu sur l’image est la plateforme supérieure et la batterie va en squatter plus de la moitié. En y ajoutant un GPS et un support d’antenne, il va falloir la jouer fine pour y fixer aussi le support caméra HD sans que rien ne gène… Bon, le montage fini, nous avons les quatre ESC reliés aux moteurs et qui, comme eux, reposent sur les bras, leurs fils d’alimentations sont reliés à la batterie par la plaque de distribution, leurs prises de type servo sont branchées sur les sorties servo de la CC3D qui en profite pour en tirer son alimentation.
Le récepteur de radio commande est branché sur les entrées PWM de la CC3D, la caméra FPV et son transmetteur sont alimentés en direct par la batterie, l’OSD est alimenté par le port « Main » de la CC3D, et voila pour le circuit électrique, c’est pas compliqué.
Pour fixer la caméra FPV, j’ai conçu et imprimé une pièce d’adaptation qui se fixe sur la plaque que vous voyez sur la photo en bas à droite, car comme de bien entendu, le PCB de ma caméra est trop petit pour s’y fixer directement.
J’ai aussi imprimé un support, trouvé sur le net, pour les antennes du récepteur.
Tout le reste est fixé avec du double face et des colliers.
Pour en finir avec l’assemblage, j’avoue qu’il n’est pas évident de fixer tous les organes sur un châssis de 250, surtout parce que certains doivent êtres tenus le plus loin possible des autres à cause de leur sensibilité aux ondes électro-magnétiques, et ils sont nombreux à rayonner (Moteurs, BEC, ESC…). Ensuite il y a beaucoup de fils, et certains éléments ne sont pas faciles à fixer, j’ai essentiellement usé de colliers, de double-face, de mousse semi rigide… C’était pratique, mais aussi une erreur pour certains organes, vous le constaterez plus loin.
Pas grand chose à dire sur la configuration de la CC3D via le soft LIBREPILOT, en mode basique tout est pris en charge via un assistant et c’est vraiment facile. En cas de problèmes, de questions, le forum est une source de renseignements utile.
Je passe aussi sur la configuration de l’OSD, une fois qu’on a les bons fichiers, il n’y a plus qu’à mettre à jour le firmware de la carte, paramétrer l’affichage en ce qui concerne ce que l’on veut comme informations, choisir un port d’envoi de la télémétrie sur la CC3d, brancher le TX sur le RX et vice-versa, ça marche du premier coup…
.
L’outillage :
Les classiques que tout le monde possède: Fer à souder, tournevis avec empreintes diverses, clés plates, clés hexa… Le dénudeur de câble automatique est un allié précieux je vous le dis…
Une imprimante 3D est aussi une alliée précieuse, capable d’imprimer des pièces de rechange et d’évolution.
- Un chargeur de batterie Lithium-Polymère capable de faire la balance entre les cellules.
- Un petit testeur de tension Li-Po avec entrée balance histoire de vérifier la tension des cellules d’un coup d’un seul, sans avoir à sortir et alimenter le chargeur.
- Un équilibreur d’hélice est aussi quelque chose d’utile, histoire de limiter les vibrations de l’engin.
Ajoutez y les consommables indispensables comme de la gaine thermorétractable (aussi facile à placer qu’emm…bêtante à enlever), du frein filet (le bleu !) pour freiner les vis de fixation des moteurs, quelques connecteurs JST, du double face, des colliers, un peu de mousse.
.
L’appareillage spécifique :
En ce qui me concerne, mon chargeur est un IMAX « B6 » enfin, plutôt une contrefaçon… D’une contrefaçon (et oui, nous en sommes arrivés la…), il est à base de micro-contrôleur et il fonctionne à merveille pour un truc que j’ai payé 15€, il charge les Li-Po, Li-Fe, Li-Io, Ni-MH, Ni-Cd et même les batteries au plomb. Il contient des programmes spécifiques de décharge, d’équilibrage, de stockage. C’est un très bon produit.
Mon testeur de tension est un CELLMETER 7, lui aussi est à base de micro contrôleur, il teste les Li-Po, Li-Fe, Li-Io, Ni-MH, Ni-Cd, et est capable de mesurer de deux à sept cellules. Il affiche des résultats au millivolt près avec une bonne précision (j’ai vérifié), en global, en individuel et en écart. Il est même doté d’une fonction d’équilibrage. Son prix: 4€.
L’équilibreur d’hélice que j’ai choisi est un classique du genre, il est composé de deux montants en carbone et d’un axe porté par deux aimants, ça marche bien et ça ne coute rien (aux environs de 2€). Par contre, il n’était lui même pas équilibré (incohérence Chinoise…), et j’ai du usiner les deux vis crantées.
J’ai ajouté à cela un testeur de servo et d’ESC, j’avais pensé en faire un à base d’ARDUINO (parfait pour envoyer du PWM), mais ce serait gâcher que de ne l’utiliser que pour cela, j’ai fini par trouver un produit qui fait très bien ce travail pour la somme de… 0,98€ port compris (devinez d’où…).
Il faut aussi des pièces de rechange. Mon conseil: deux moteurs, deux ESC, deux bras de support moteur, du coaxial d’antenne, histoire de ne pas se retrouver en rade pour pas grand chose.
Voila, nous avons donc fait le tour de ce qu’est un drone, et des outils indispensables pour le maintenir en fonction. Nous allons donc passer à la suite, qui croyez moi, est plus réjouissante…
.
Que le spectacle commence !!!
Ma femme a eu raison de fermer la porte de la cave à clef, mais j’avais un double…
Du coup, en trois jours, le drone était assemblé, configuré, et prêt à voler.
Acte 1 : Ça vole !
Son premier vol a eu lieu dans mon atelier, il ne s’est rien passé de grave mais c’était déjà une erreur, je voulais voir s’il était capable de hisser ses 540 grammes à la force de ses hélices, ce qui à bien été le cas, mais avec une tendance à dériver en arrière (mauvais calibrage du gyro). J’ai donc commencé à entamer les hélices contre la porte et les murs.
Acte 2 : Ça va casser !
Après avoir fait quelques réglages de stabilisation via le soft, je me suis dit que dans le salon il y aurait plus de trucs à casser place.
C’est la que le drone m’a expliqué à sa manière que j’aurais du mieux réfléchir au positionnement des moteurs…
Il a décollé d’un mètre, a perdu une hélice et s’est jeté sur la fenêtre qui était fermée et protégée par des stores en bois.
Il a quand même réussi à fendre une lamelle de store et a en entamer trois autres !
La vitesse et la force avec lesquelles il s’est précipité sur le store m’ont scotché sur place, ainsi que le regard sympa de ma compagne présente lors de l’essai.
Mon erreur à été de ne pas disposer les moteurs comme il fallait, ils tournaient bien dans les sens prévus mais je me suis planté au niveau des filetages des axes.
Résultat; l’axe du moteur qui a perdu l’hélice était fileté dans le sens de la rotation et le boulon de serrage de l’hélice s’est fait la malle. Même punition du coup pour l’axe du moteur diamétralement opposé.
Bon, je corrige ça (tu parles d’un truc sympa, démontage des moteurs donc virer la gaine thermo, dessoudage, remontage, ressoudage, re-gaine) et je décide de laisser tomber les essais en intérieur.
Acte 3 : Ça va faire mal !
Le lendemain, je sors le drone dans le jardin histoire de m’initier à son pilotage car j’oubliais de vous dire que je n’ai aucune compétence en matière de pilotage de drone.
Je me dis qu’en faisant ça tout doux, en limitant la hauteur et les déplacement latéraux au minimum, rien de grave n’arriverait.
Et ce n’est pas si difficile que ça finalement de piloter un drone, c’est assez docile, ça se contrôle bien.
Et c’est sur cette pensée que j’ai envoyé le drone dans le barbecue en lui arrachant une antenne et deux hélices au passage…
Retour à la cave pour réparer ça (la soudure du fil coaxial de l’antenne sur le récepteur, c’est coton).
J’en profite pour faire quelques nouveaux réglages, je crée un mode de vol avec stabilisation maximale et encore devant ma femme, le drone décide de me donner ma troisième leçon: il ne faut pas faire d’essai drone en main sans enlever les hélices si on veut conserver ses dix doigts intacts…
Le temps d’enlever mon petit doigt des pales, en même pas une seconde l’hélice a eu le temps de faire 3 tours et demi… Et comment fais-je pour être si précis ?
Un simple calcul : trois (tours) virgule cinq multiplié par deux (pales) égale sept entailles, avec en bonus, du sang… Et un bel hématome !
Epilogue : Ça monte, ça descend, ça remonte, et ça fiche le camp !
Le sur-lendemain, le doigt encore douloureux, bien pansé par ma compagne et son joli regard noir. Pas découragé pour autant j’y retourne, bien décidé à arrêter de faire n’importe quoi.
Heureusement, ma femme était absente quand le drone a décidé de me donner sa dernière leçon avant de tenter une autodestruction. Elle serait partie aussi sec acheter quelques parpaings dont un supplémentaire qu’elle m’aurait forcé à manger pendant qu’elle arracherait la porte du sous sol pour y monter un mur à la place.
Bref, les essais se passaient bien, il faisait beau, et j’avais branché l’ARCHOS sur le récepteur vidéo pour immortaliser tout ça. Une de mes filles était à l’intérieur devant l’écran de contrôle. Mon fils se tenait à mes cotés prêt à bondir, se demandant comment tout cela se terminerait.
Le drone était docile et super stable.
Au bout de dix minutes de décollages et d’atterrissages plus ou moins réussis, de rotations, de translations de mieux en mieux négociées… Sans prévenir…
Le drone décide de partir en voyage dans l’espace !
J’étais pourtant super light sur les gaz… Donc imaginez ma surprise de voir l’engin partir en deux secondes à plus de vingt mètres d’altitude, et continuer sa montée alors que j’avais mis la manette des gaz à zéro après les 5 premiers mètres.
Pas d’autre choix pour moi que de couper la radio, le failsafe que j’avais heureusement configuré fait son office, le drone prend encore quelques mètres et retombe… Sur le toit de la maison, y rebondit et finit sa course par terre en éparpillant quelques pièces (batterie, morceaux d’hélice, objectif de caméra, pieds, colliers). Ça fait réfléchir, la chute d’un drone est déjà dangereuse, mais si on a la chance d’y échapper, il vaudrait mieux éviter de se prendre pleine face une de ses pièces éjectées…
La vidéo me montre bien qu’il est capable de monter très vite et très haut, j’ai d’ailleurs maintenant une vue imprenable sur les alentours vus du ciel :

Remarquez en passant qu’il monte bien droit avec un pitch de -1° et un roll de 3°.
Puis une des dernières images avant la rencontre avec le toit que vous pouvez voir apparaitre en bas de l’image, le roll est resté correct, par contre le pitch déjà à -55°, et qui va encore s’accentuer, montre bien que la caméra va s’en prendre une bonne… Il terminera sa course contre le muret au fond :

Voici l’animal après le crash (pas trop abimé après une chute de 20-30 mètres sur un sol dur) :

Les dégâts: hélices, gaines des ESC abimées, un des moteurs est bloqué, l’objectif de la caméra arraché ainsi que le positif de la batterie, les pieds se sont dé-clipsés, le carbone est un peu râpé à l’avant, c’est tout .
Vue imprenable sur le capteur CCD :

J’ai fait quelques constatations :
- Le failsafe fonctionne mais c’est trop radical, il serait utile d’y adjoindre un GPS afin de le lier au RTH, mais il faudrait pour cela changer de CDV.
- Les quatre ESC sont trop exposés de par leur positionnement sur les bras, ils sont râpés et quatre des huit colliers ont dégagés lors de l’impact.
- L’objectif de la caméra gagnerait à être plus enfoncé dans la structure, ça lui éviterait de partir en ballade.
- Les moteurs pourraient-êtres mieux protégés.
- Les pieds sont nuls.
Il y a donc des modifications à faire…
Déjà, au niveau électrique c’était pas vraiment ça, honte à moi qui ai fait ça sans vraiment trop réfléchir, résultat: des parasites sur l’écran quand les moteurs s’activent, l’OSD qui disparait dans les mêmes conditions…
Il faut donc soigner le câblage au niveau des longueurs et des passages de fils, et puis vérifier les masses.
Les fixations des circuits (CC3D, transmetteur vidéo, OSD…) sont trop sommaires.
C’est pas terrible tout ça, et pas digne de moi.
.
Au boulot !
Déjà quelques petits achats :
– Deux nouveau moteurs, l’un est mort en rencontrant une tuile, le rotor s’est tordu et a enfoncé la base du stator, résultat: le moteur est bloqué.
– Un CDV « REVOLUTION » histoire d’avoir le RTH et pouvoir lui imposer au drone une altitude maxi imposée sur un mode de vol.
Pour cela il faut un magnétomètre et un capteur de pression barométrique, la CC3D de base ne les intègres pas et si ses ports E/S permettent de les ajouter, sa mémoire est trop étroite pour pouvoir les gérer via du code supplémentaire, je l’ai déjà dit mais je le répète: c’est nul comme concept d’offrir des ports E/S non ou peu exploitables, mais c’est ma faute: j’aurais du plus me renseigner avant d’adopter le modèle de base, ce n’est pas bien grave il servira sur un autre projet.
– Un récepteur radio « IA6B » pour passer du PPM afin de simplifier le câblage.
– Un GPS de très petite taille: l’Ublox 7 Mini. Petit mais long à l’acquisition satellite.
– Une caméra CCD « 700TVL » ma caméra est irréparable après sa rencontre violente avec le toit de ma maison, j’ai refait la fixation de l’objectif, soudé un CMS qui s’était fait la malle, inspecté son circuit au microscope… Rien à faire, elle ne sort plus de signal, je pense que le capteur CCD est mort.
J’ai donc acheté la même, c’est vraiment un bon produit.
– Des vis M3 20mm têtes bombées hexa pour la fixation des bras après élargissement de l’écart entre les deux premières plaques du châssis à l’aide d’entretoises imprimées afin de rassembler les ESC. Ca évite de les fixer sur les bras avec des colliers.
Inconvénient: ils sont moins accessibles en cas de panne.
Avantages: ils sont plus en sécurité et plus proches du centre de gravité.
Le montage est serré, j’ai du couper un peu de gaine, mais bon, j’espère que la chaleur n’y sera pas trop importante.
Les vis, je les ai achetées en Chine. Pourquoi en Chine ? Parce qu’en France elles sont beaucoup trop chères… Quand on les trouve…
Mince alors ! Vous avez la-bas 100 vis M3 20mm hexa têtes bombées livrées, pour le prix seul du port de 16 pièces ici !!!
Ça vaut le coup d’attendre un peu (pas beaucoup) pour les recevoir.
Bon, j’avoue, j’ai tout acheté la-bas, je sais, c’est mal… Mais je ne fais pas partie des grosses fortunes de ce monde, je vous ai donné l’exemple du prix des vis, j’aurais pu aussi vous parler de la caméra à 8€ livrée (en une semaine) qui coute ici 30€ et plus sans les frais de port… Oui, il y a des raisons à ces marges délirantes, je le sais, mais faut pas déconner. Il y en a qui se demandent pourquoi les entreprises en France vont mal ! Les solutions que les politiques proposent et imposent montrent à quel point ils ne maitrisent pas le sujet. Ils sont si loin de la réalité des choses… Qu’ils viennent me voir, je règle une bonne partie du problème en 5 minutes et gratos, la ou deux abrutis et leurs staffs respectifs n’ont pas réussi en 10 ans.
Désolé, de sortir, comme à mon habitude, du sujet mais il y a de quoi rager, avouez le !
.
L’heure des comptes :
Comme je l’ai dit, cette fois j’ai tout acheté en Chine mais je ne suis pas passé par un seul vendeur. En effet, celui qui offrait le meilleur prix pour le châssis n’était pas aussi compétitif pour le GPS par exemple. De ce fait, tous les organes viennent de vendeurs différends. Il a fallu quelques heures pour trouver les bons vendeurs, les bons produits et les bons prix. Le bon coté des choses ce sont les économies faites, le mauvais coté c’est l’anarchie totale lors de la réception. Le principal: tout est arrivé en bon état et en ordre de marche. Voici les éléments que j’ai achetés:
Châssis : QAV250 en carbone 3mm X1
Contrôleur de vol : CC3D X1
Moteurs : EMAX 1806 2280KV X4
ESC : 12A avec BEC 5V 1A, firmware Simonk X4
Radio commande : FLYSKY FS-I6 et récepteur 6 canaux FS-IA6 X1
GPS : Ublox 7 Mini X1
Batterie : Li-Po 2200 mAh 3S 30C X1
Camera FPV : 700TVL capteur CCD, DSP SONY EFFIO, objectif 2.8mm X1
Émetteur audio/vidéo : TS5828 X1
Récepteur audio/vidéo : RC305 X1
OSD : Micro MinimOSD X1
Plaque de distribution : MATEK mini power hub X1
Sonde de voltage/courant : ATTOPILOT 90A X1
J’y ai ajouté un circuit MATEK contenant deux buzzer. Ses fonctions: alarme de batterie faible et, en cas de perte du drone, activation des buzzer via l’interrupteur accessoire de la radiocommande. Il possède une autre fonction qui active les buzzer en cas de perte de la liaison avec l’émetteur (cela permet d’économiser une prise servo puisqu’il suffit de couper la radio pour activer les buzzer). C’est un petit circuit léger et utile.
Prix total: 175€
Je n’ai pas compté la REVOLUTION que j’ai acheté après le gros crash, parce que ça n’a pas changé grand chose au comportement du drone. Tout le monde n’a pas besoin d’un RTH ou d’une navigation autonome. Et puis elle fonctionne toujours, la CC3D… Je n’ai pas compté non plus l’IA6B parce que ça n’a rien changé non plus à part la simplification du câblage, je précise que ce récepteur est un peu plus encombrant et un peu plus lourd, je ne crois pas y avoir gagné au change…
J’ai regardé les prix en France de l’équivalent neuf et monté, en gros il n’y a rien en équivalent en dessous de 400€ (et encore sans toutes les options) sans compter (ainsi que je l’ai déjà dit dans un autre article) la joie du « faites le vous même » ajoutée au fait de maitriser complètement le sujet et ainsi d’en comprendre parfaitement le concept.
Et puis il y a aussi quelques pièces faites maison :
– Un couvercle fixé sous le drone pour protéger la carte de distribution/BEC et les câbles venant s’y connecter, je ne vous raconte pas le boulot et les essais d’impression (le PET c’est galère pour la buse, et il faut chauffer à 250°). J’y ai prévu un insert pour une LED WS2812B raccordée à la CC3D (j’en parlerais un peu plus tard).
Je n’en suis pas peu fier, c’est une superbe pièce semi-transparente qui permet de voir les LEDs d’alimentation des BECs ainsi que la 2812B.
Voici :

– Des pieds en PET, les pieds en carbone fournis glissaient le long des bras, ou bien se dé-clipsaient sur les gros chocs, et lors du dernier crash, l’un a disparu (surement dans la gouttière, qu’il y reste !…).
– Un boitier en PET pour l’OSD, la carte étant petite et vulnérable.
– Une coque avant en ABS, avec support permettant une meilleure protection de l’objectif de la caméra qui ne dépasse maintenant plus autant de l’avant du drone.
– Une coque arrière en ABS avec un insert XT60 permettant une connexion plus aisée de la batterie et intégrant un support pour le transmetteur vidéo et son antenne évitant l’arrachement du circuit imprimé en cas de choc, (en effet, l’embase de l’antenne est directement soudée sur le PCB).
– Des entretoises inférieures pour l’arrière et l’avant, avec emplacements pour bandes de 3 LEDs (bleues/blanches) permettant de distinguer l’avant de l’arrière.
– Un support d’antennes du récepteur radio, en ABS.
– Des protections moteurs en ABS.
Ouf !…
Comme vous l’avez constaté, l’imprimante 3D a été mise à contribution, je le répète: c’est un outil vraiment utile qui me rend d’innombrables services depuis que je l’ai fabriquée. J’ai utilisé de l’ABS pour les parties opaques et du PET pour la solidité et la transparence (utile pour voir les LEDs des circuits).
Grâce à elle et à OpenScad (ajoutez quelques heures de boulot pour concevoir les pièces), le drone fait (un peu) moins usine à gaz !
Revers de la médaille: avec tous ces ajouts (pièces imprimées, GPS…), Il a pris du poids l’animal, il est passé de 540 à 650 grammes, au vu des nombreuses améliorations cela reste raisonnable.
Voila à quoi il ressemble terminé à 96% (il manque la sonde courant/tension, les buzzers, les protections moteurs et l’organisation des câbles) :





Je l’ai essayé dans un grand espace, ça c’est bien passé, il est stable et réactif, il monte assez vite, mais j’avais un problème avec l’effet de sol, j’essayais de stabiliser trop bas, en décollant trop lentement et j’ai encore coupé une antenne en retournant la bête au décollage, c’est une vraie plaie ces antennes… Il faut les placer en sécurité (facile au milieu de quatre hélices), et elles ne doivent pas êtres proches du châssis (à cause du carbone qui est un matériau conducteur).
La moindre chute sur le dos: elles ploient et vont à la rencontre des hélices qui, si elles tournent encore, n’en font qu’une bouchée car elles sont fragiles et la protection par de la gaine thermorétractable est illusoire…
D’ailleurs, l’antenne, c’est quoi ce truc ?
C’est vraiment rudimentaire: un fin fil coaxial dont une partie au bout est dépourvue de masse tressée (ce qui la rend encore plus fragile…).
Il y en a deux (ce récepteur émet aussi), et celles qui équipent l’IA6B sont différentes de celles de l’IA6.
Sur l’IA6B y a en plus, des cylindres de cuivre creux, et bien entendu, c’est la que ça a été arraché, donc il m’a fallu enlever toute la gaine thermorétractable, dessouder la masse, dégainer le câble pour enlever un bout de tresse de masse afin d’en souder 2mm sur le cylindre en laissant dépasser 29mm de fil sans masse (ni plus, ni moins c’est important car c’est la partie active accordée à la longueur d’onde).
Mon drone a maintenant une antenne plus courte que l’autre, cela n’a aucune incidence sur la portée car la partie active est celle qui dépasse du cylindre.
Bon, j’ai conçu et imprimé un autre support, et comme la cause était une tige rompue, j’ai abandonné le système de longues tiges creuses et opté pour un système d’accroche plein et plus court, donc moins susceptible de casser, la base de l’antenne étant fixée dessus avec de la gaine thermo. C’est bien mieux, les antennes sont plus rigides, elle ne ploient plus trop…
Bon, du coup je n’ai pas pu le faire voler plus de 10 minutes mais les essais furent prometteurs, j’ai pu tester ses performances (qui m’ont vraiment impressionné), car j’avais un meilleur contrôle aidé par un grand espace d’évolution loin de tout. Il me manque quand même de la pratique.
Cet été j’aurais à ma disposition un grand terrain privé, ce sera l’idéal, en attendant je me suis penché sur une autre réalisation en rapport:
Une mallette de transport pour le drone et ses accessoires (émetteur radio, outils, hélices de rechange, batteries, chargeur…). Dotée d’un panneau amovible pouvant se fixer sur un trépied comportant :
- Le récepteur audio/vidéo et son antenne.
- Un support conçu et imprimé par mes soins pour l’ARCHOS (visu/enregistrement).
- Une batterie 3S plus un BEC 5V.
- Des connecteurs divers et des interrupteurs.
Pour finir, j’ai confectionné un masque d’immersion avec l’aide précieuse de mon imprimante 3D. Alors la, je ne vous raconte pas la galère, entre la conception des pièces via OpenScad et leurs réalisations, nombre d’heures se sont écoulées. L’impression elle même a été fastidieuse, les deux demies coques ont nécessitées 6 et 7 heures d’impression chacune, je n’avais jamais tenté d’imprimer de tels volumes jusque la et le plus agaçant dans ce cas est la rétractation de l’ABS qui va soit remonter les bords si la pièce se décolle du plateau, soit fissurer les parties fines si elle est bien accrochée. Mais après quelques corrections tout c’est bien passé et le masque d’immersion est vraiment sympa. De plus, il peut avoir d’autres usages (regarder une vidéo par exemple), et d’autres idées me sont venues genre contrôler une camera par les mouvements de la tête (voir même celle du drone !)… C’est pour plus tard…
.
Bien, maintenant le bilan :
je vous avais prévenus, ce genre de sujet mêle beaucoup de domaines différents (électricité, électronique, mécanique, programmation, aérodynamisme, radio-électricité, optique…) un bouquin n’y suffirait pas car les évolutions sont constantes. En me contentant de survoler le sujet, l’article traine en longueur et pourtant je l’ai épuré un bon nombre de fois…
Un drone, c’est vraiment un engin bourré de technologies.
Je suis stupéfait d’un fait en fait 🙂 Il y a dans mon drone, pas moins de six !!! Micro-contrôleurs, un dans le CDV, un dans chaque ESC, un dans l’OSD.
C’est complètement dingue, et encore, je ne vous parle que de ceux sur lesquels une reprogrammation par l’utilisateur est possible.
Je repense à un article que j’avais lu dans un célèbre magazine d’électronique, écrit par un guignol qui râlait en disant que les micro-contrôleurs étaient des trucs de fainéants et que l’électronique traditionnelle (sans programmation) avait encore de beaux jours devant elle… Ça se défend, mais un drone analogique équivalent (techniquement), ça doit être un truc monstrueux en taille et très galère à régler.
Moi, je me suis régalé, c’est facile si on est un peu méticuleux, plus gratifiant (et plus économique) que d’acheter un truc tout fait. Même il y a eu quelques moments plus difficiles du genre :
– Placer les organes sur et sous le châssis, pas toujours été évident.
– J’ai failli perdre un doigt (je sais j’abuse).
– La mise sur orbite ratée a immobilisé le drone un moment, et même si, ainsi que mon fiston me l’a si bien expliqué, cela m’a permis de bien faire évoluer l’animal, ça a eu un certain cout (je pense surtout en temps passé dessus).
– Les deux moteurs que j’ai achetés en pièces de rechange, ne m’ont pas couté cher, et pour cause: l’un a un jeu axial énorme et l’autre a des roulements usés ou montés à coups de marteau, je ne vous parle pas des bobinages grossiers enroulés à la main, ça sent le rafistolage et/ou la contrefaçon. Bon, c’est aussi ça la Chine… Je ne m’en plains pas vraiment, le principe étant d’acheter le double de ce dont vous avez besoin des fois que… Et vous restez gagnants au final.
Alors j’ai du démonter les moteurs (dont celui HS) pour en faire un correct.
Maintenant je peux en une minute transformer un CW en CCW par démontage et échange des rotors, c’est utile (et facile).
Et quelques imprévus comme pour l’installation de la LED WS2812B, je vous raconte…
L’idée d’utiliser une LED de ce type est intéressante, et prévue par le soft. On peut en chainer jusqu’à dix, par contre, LIBREPILOT ne permet pas de les personnaliser (c’est possible dans CLEANFLIGHT), ce qui est fort dommage, cela permettrait par exemple de changer les couleurs de signalisation arrière dans le cas de courses.
Donc, une fois branchée, la LED permet via des séquences de diverses couleurs, de renseigner le pilote sur l’état des alarmes, du mode GPS, de l’armement etc… Avant le décollage (et même après si on pilote à vue).
Il est possible de la connecter sur une sortie servo ou bien sur une des sorties 3 ou 4 du connecteur appelé « FlexiIO ».
Il est génial ce connecteur, il permet de recevoir les signaux PWM ou PPM, d’envoyer la télémétrie, et dispose de deux ports GPIO (General Purpose Input Output) certainement reliés en direct sur deux pattes du STM.
Comme je n’ai pas envie d’utiliser la dernière sortie servo qu’il me reste pour le simple contrôle d’une LED RGB, l’utilisation d’un des deux ports GPIO me convient, et c’est après avoir soudé l’alimentation de la LED que je me suis rendu compte que les connecteurs 3 et 4 du câble FlexiIO n’étaient pas peuplés !
Carte Chinoise… Pas de petites économies… Dans ce cas, deux petits câbles, mais multipliés par quelques milliers de cartes, cela permet certainement d’aider à tirer les prix. Ça ne va pas empêcher le drone de voler, par contre pour certains utilisateurs, c’est pas cool.
C’est un connecteur avec de tous petits contacts, j’ai cherché dans mon fouillis, mais pas possible d’en trouver un autre pour le dépouiller.
Alors j’ai dépeuplé un des autres câbles fournis avec la CC3D.
C’est un exemple de petit imprévu, mais on perd du temps avec ces broutilles !
Je suis content d’avoir pu mener ce projet à bien, mais je sens que ce n’est pas terminé, j’ai plein d’idées qui se bousculent pour l’améliorer en y ajoutant des fonctionnalités, par exemple l’asservissement de l’inclinaison de la caméra via un servomoteur contrôlé par un des potentiomètres de la radiocommande voire directement par les signaux du capteur d’inclinaison du CDV puisque LIBREPILOT gère parfaitement cela en piquant au passage une sortie servo par axe à gérer (ce qui est la moindre des choses).
En attendant, cet objet est déjà très utile pour aller la ou je ne peux, et en ramener de bien belles images. Et je ne vous parle pas des joies et sensations du pilotage en immersion qui ne sont pas loin de celles qu’on pourrait avoir avec un véritable aéronef sans les conséquences souvent dramatiques d’un crash (la, pour le coup, je suis déjà mort plusieurs fois…).
Cette histoire n’est donc pas terminée pour moi, mais pour vous, c’est ici qu’elle prend fin… Ou qu’elle débute !
Voila, j’espère que cet article vous a appris des choses, c’était d’ailleurs, en plus de vous divertir quelque peu avec mes aventures, son objectif premier.
Pour conclure, je tiens quand même à préciser que je ne suis pas marié à une matrone ex-championne de lancer de poids d’Allemagne de l’EST.
Ma compagne est charmante, super sympa et d’un gabarit plus que raisonnable, elle est partante dans tous mes délires, y participe activement et elle c’est bien marrée en lisant l’article…
AIE !!!… Non chérie ! … Pas la tête !!!
.
A bientôt.

bonjour très jolie projet mais pourrais-je avoir les plans électrique les cablages et des photos plus précise du drone merci
Publié par barthes | 2 janvier 2017, 21:28Bonjour.
Le schéma électrique est rudimentaire, la batterie d’accus est reliée via une plaque de distribution aux différents organes nécessitant une alimentation de 12V en direct. Pour ceux qui n’en demandent pas tant, une tension de 5V peut-être prélevée sur un ESC qui en général est pourvu d’un BEC (battery éliminator circuit). Quand à l’ESC, il se câble d’un coté au contrôleur de vol correspondant à sa fonction via une prise « servo », ensuite directement sur la plaque de distribution, et pour finir au moteur.
Quand aux photos plus précises, je verrais ce que je peux faire, mais pour l’instant je ne m’en occupe plus trop, j’entretiens les batteries et j’attends les beaux jours.
Publié par lorenzo | 3 janvier 2017, 03:37très bien merci. comment avait vous fait pour avoir un revient a 175euros
Publié par barthes | 7 janvier 2017, 21:52J’ai tout acheté en Chine, pratiquement pièce par pièce…
Publié par lorenzo | 8 janvier 2017, 00:13oui mais sur quel site car sur banggood les mêmes pièces la totalité revient à environ 270 euros
Publié par barthes | 8 janvier 2017, 19:00Ce genre de sites oui, pour payer moins, cherchez les ensembles « chassis/ESC/moteurs/CDV » correspondants à votre cahier des charges. Il y en a des bons aux environ d’une soixantaine d’Euros, Ajoutez y une quarantaine d’Euros pour la radio-commande et une vingtaine pour la batterie. Après quelques heures d’assemblage, de soudures, de montage puis de configuration, vous vous retrouvez avec un drone qui vole pour environ 120€. Il reste assez pour l’achat d’un transmetteur vidéo et une petite caméra. Le reste, écran, DVR, etc… N’était pas compté pour la simple raison que je possédais déjà ces éléments. Ainsi que les petits trucs imprimés par mon imprimante.
Publié par lorenzo | 8 janvier 2017, 20:22a 60euros y’a pas beaucoup d’ensemble de ce type
voila moi :
radio commande: FlySky-FS-i6-2_4G-6CH-AFHDS-RC-Transmitter-With-FS-iA6B-Receiver
moteurs: Racerstar-RF2205-2205-2300KV-3-4S-Brushless-Motor-2-CW-2-CCW-for-FPV-Race
esc 30A: Emax-Simonk-Series-12A-20A-25A-30A-40A-ESC-For-Quadcopter-QAV-250
chassis: H250-ZMR250-250mm-Carbon-Fiber-Mini-Quadcopter-Multicopter-Frame-Kit
carte de distribution: RROSD-EVO-V1-12V-5V-3A-BEC-OSD-Power-Distribution-Board
controleur de vol: OpenPilot-CC3D-Flight-Controller-STM32-32-bit-Flexiport
batterie: ZOP-Power-11_1V-1800mAh-65C-3S-Lipo-Battery-XT60-Plug
hélices: 6-Pairs-Gemfan-5030-CW-CCW-ABS-Propellers-For-ZMR250-QAV250-280-180-RC-Multirotors
chargeur batterie: IMAX-B6-Digital-RC-Lipo-NiMH-battery-Balance-Charger
que en penser vous?
Publié par barthes | 8 janvier 2017, 20:37Jetez donc un œil aux tarifs d’autres sites comme aliexpress qui ont aussi de bonnes affaires dans ce domaine. Il n’y a pas grand chose à dire sur vos choix étant donné qu’ils ressemblent beaucoup aux miens sauf au niveau motorisation et alimentation ce choix d’ailleurs vous emmène au delà du budget de mon article qui s’appuie sur un autre ensemble ESC/motorisation moins cher puisque fourni avec un châssis et un contrôleur de vol. Sinon oui, une remarque: la batterie me semble un peu faiblarde. Une 2200 mAh me semblerais plus adéquate. Je vous dis ça compte tenu du fait que la mienne qui est d’une capacité de 2200 mAh n’offre qu’une vingtaine de minutes de vol tranquille, et moins en mode moins tranquille…
Publié par lorenzo | 9 janvier 2017, 01:41Ah ok merci du conseil alieexpress n’est pas un site fiable je tien compte pour la batterie je mettrais une 4s
Publié par Alexis | 9 janvier 2017, 10:33Y »a t’il du matériel suplémenyaire a acheter cable…….
Publié par Alexis | 9 janvier 2017, 12:50J’ai fait beaucoup d’achats sur Aliexpress. Et je n’ai jamais rencontré de problèmes autres que certains délais de livraison. En quoi ce site serait moins fiable que Banggood ?
Pour la batterie, Pas besoin d’une 4S pour ce type de drone, une 3S suffira. Les câbles fournis sont généralement suffisants pour un montage standard. Il faut même souvent les raccourcir.
Par contre, soudure et gaine thermo sont de mises.
Publié par lorenzo | 9 janvier 2017, 13:29Le moyen de paiment est plus sécurisé maisles. Prix sont plus avantageux
Publié par Alexis | 9 janvier 2017, 18:54Et au niveau de la douane ?
Publié par Alexis | 9 janvier 2017, 18:56En ce qui concerne la douane, en découpant la commande en petits bouts, on passe à travers.
Publié par lorenzo | 9 janvier 2017, 21:04Ah tres bien et le moyen de paiment le mieux adapter sur aliexpress c’est quoi ?
Publié par Alexis | 9 janvier 2017, 21:46La CB, en tout cas c’est celui que j’utilise.
Publié par lorenzo | 11 janvier 2017, 13:08Ok merci pour tous ?
Publié par Alexis | 11 janvier 2017, 17:42